

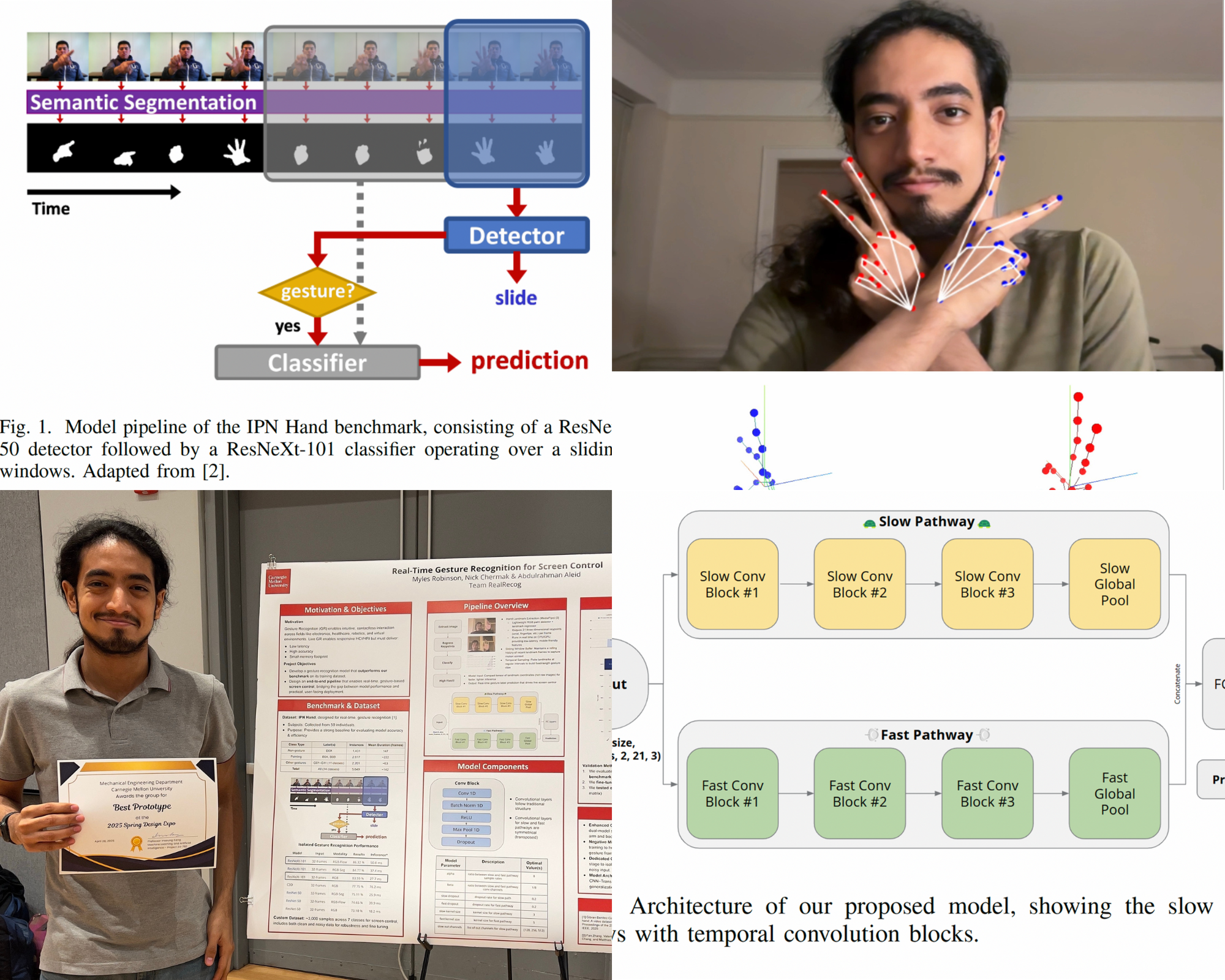
RGB-only real-time gesture recognition for screen control
Context: Course Project, 24-788 Artificial Intelligence and Machine Learning
Enables low-latency gesture-based interaction using RGB input only, without specialized sensors; I led data collection and preprocessing and implemented the RGB-to-landmark dataset pipeline for training and evaluation.
Date: 2025
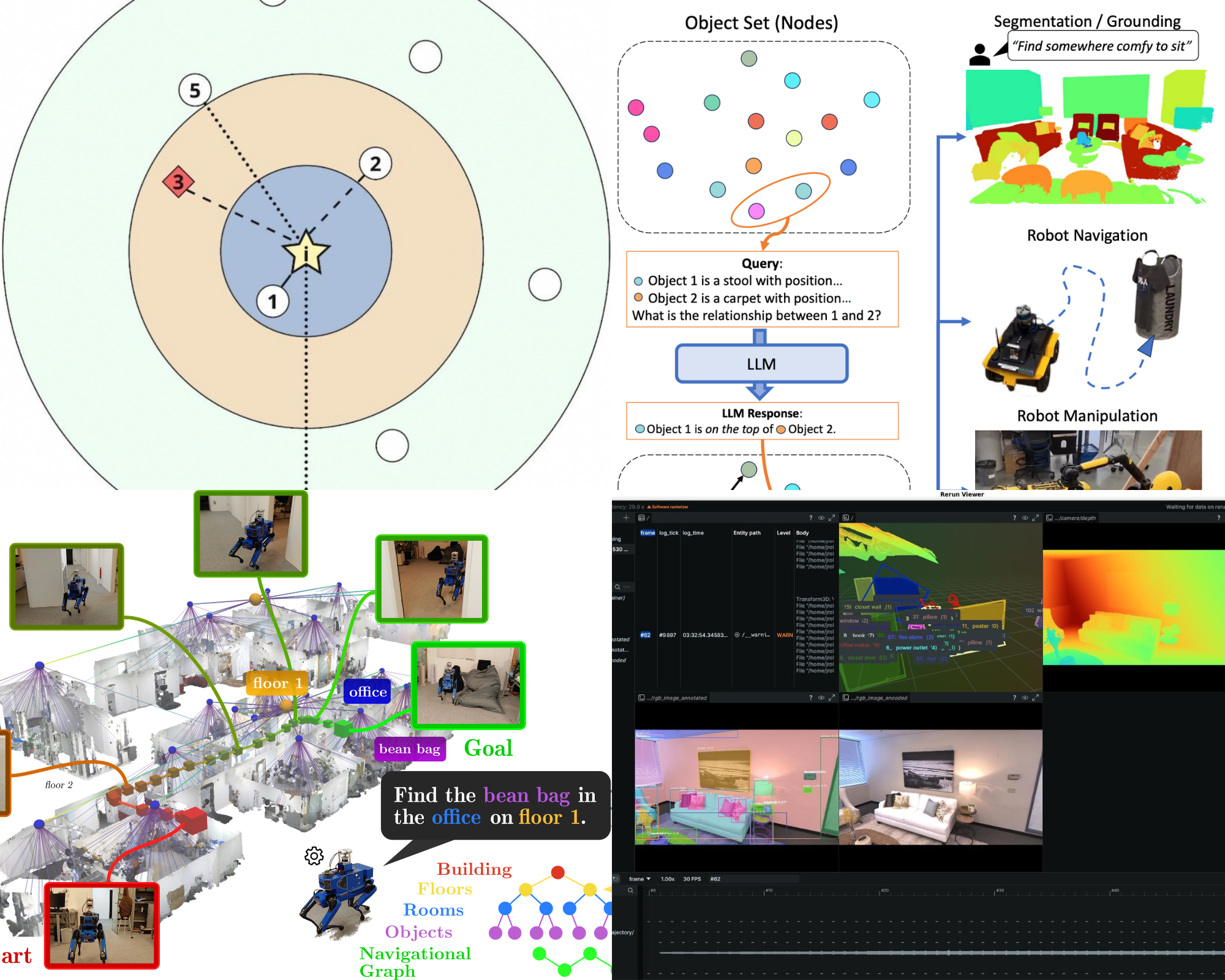
How Much Language Do Robots Really Need?
Context: Course Project, CMU 11-851: Talking to Robots
Makes scene graph–based, language-enabled robot navigation more deployable by reducing reliance on cloud language APIs under edge-compute constraints; I redesigned the semantic pipeline and implemented a geometry-grounded disambiguation module.
Date: 2025
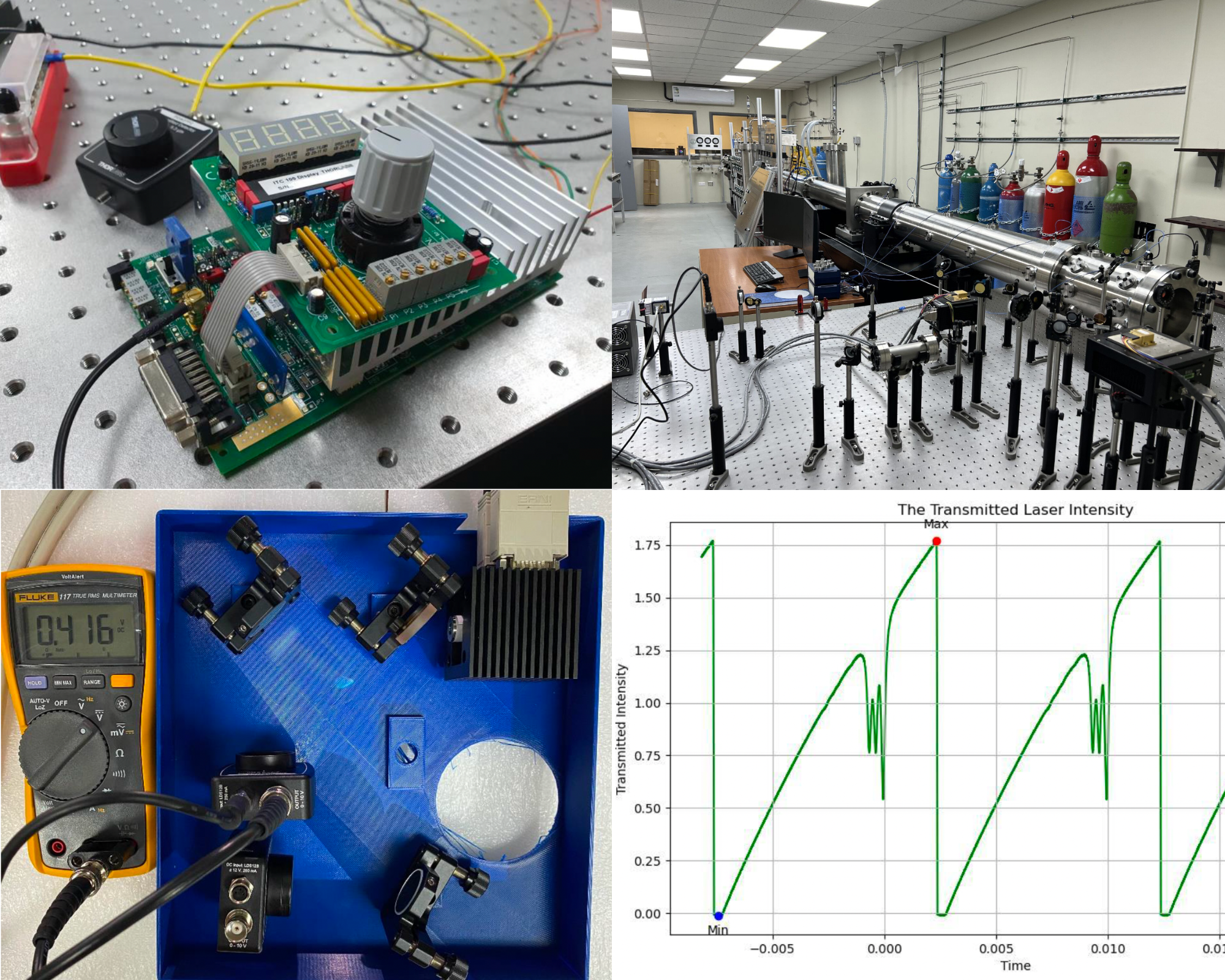
SkyBeam: Laser-based methane sensing payload for UAV deployment
Context: Senior capstone project + Undergraduate Research (UXplore231 Grant)
Enables rapid and deployable methane leak detection by integrating laser absorption spectroscopy with a UAV platform; I originated the concept and led the spectroscopy design, validation, and mechanical integration.
Date: 2024
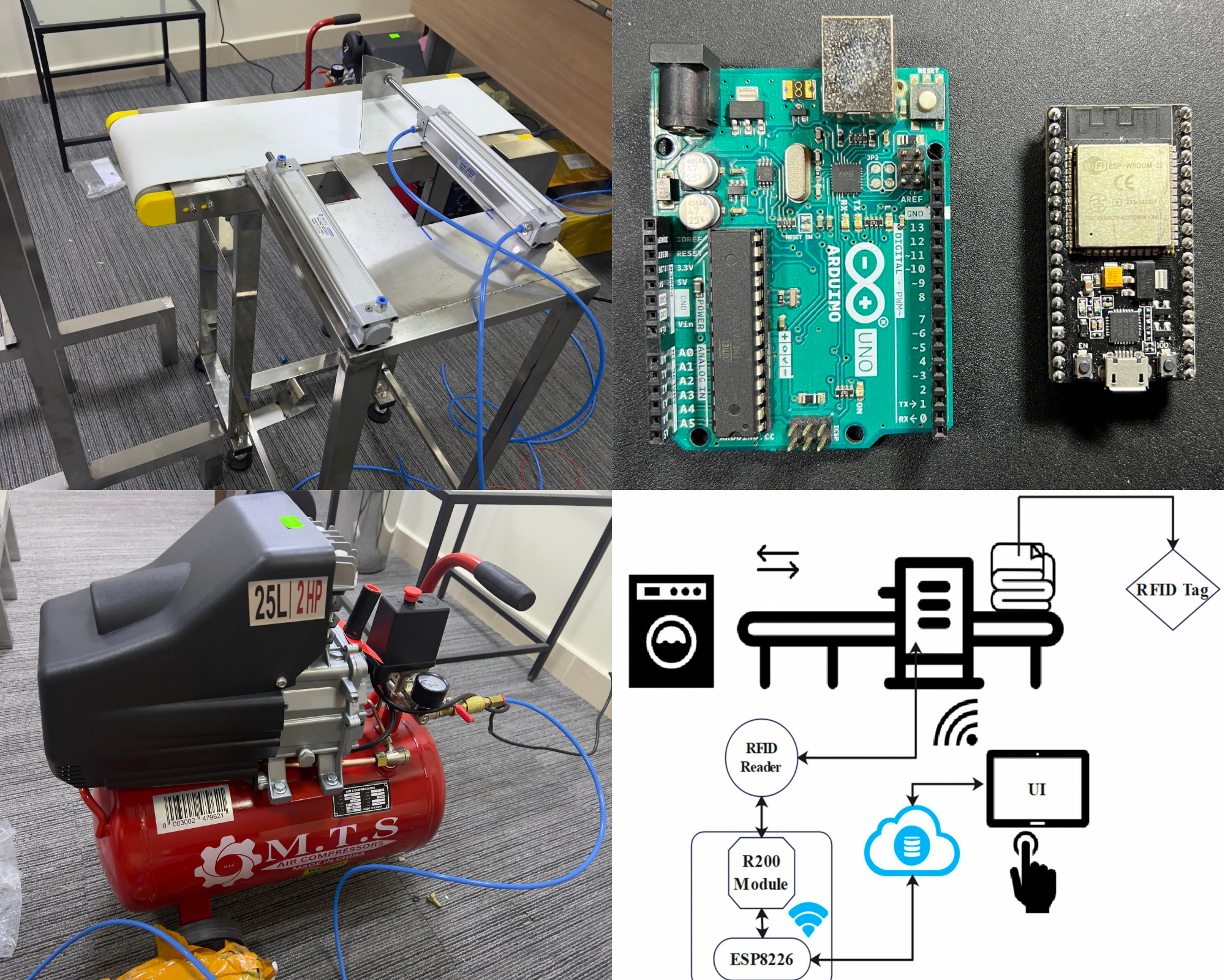
RFID-enabled industrial laundry tracking and sorting platform
Context: Industry-Sponsored Capstone Project
Reduces waste and operational inefficiency in industrial laundries through item-level tracking as a foundation for automation; I built the end-to-end RFID, embedded, and cloud-logging system and validated its performance.
Date: 2024
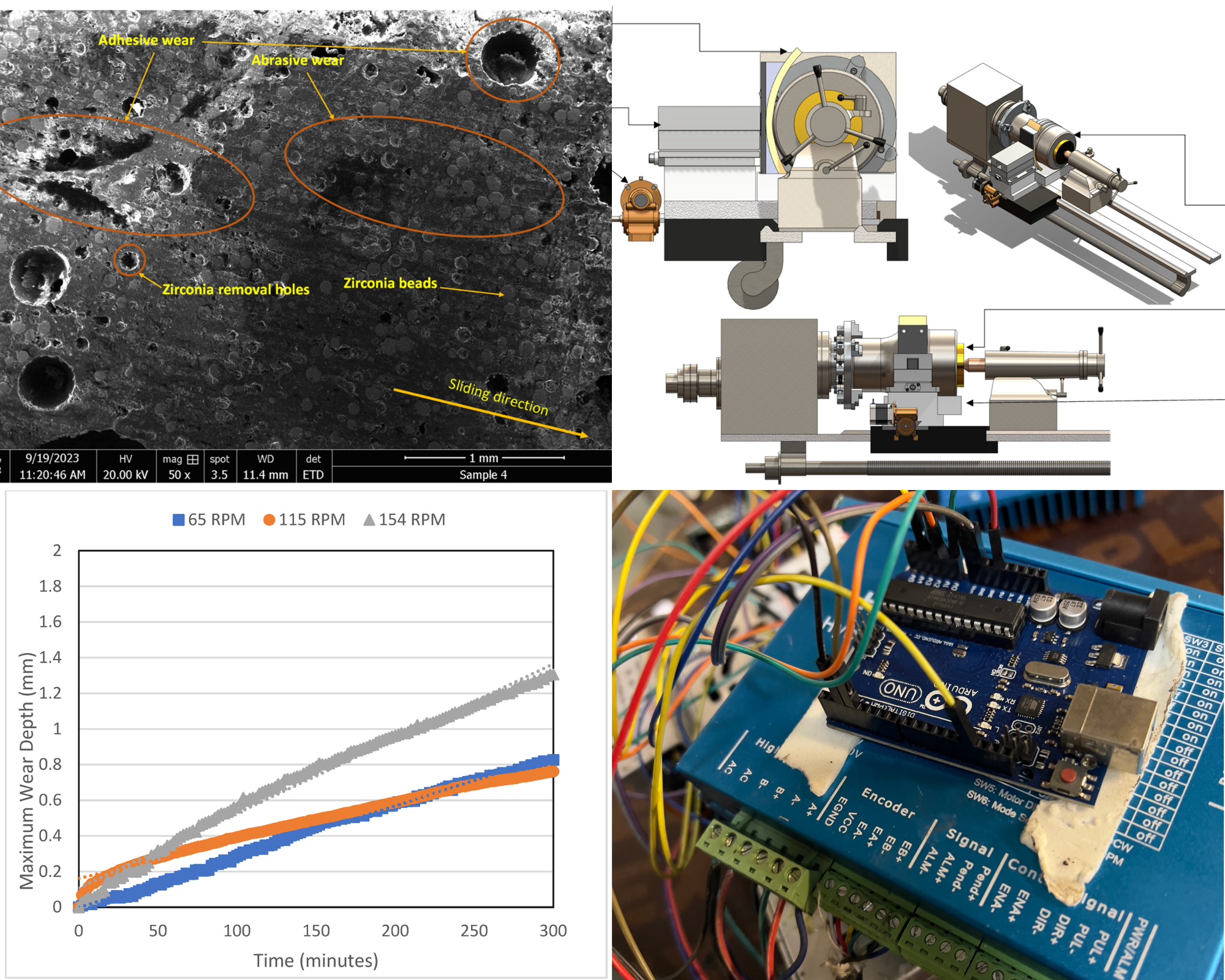
Tribological characterization of a ceramic–epoxy–Kevlar composite lining
Context: Undergraduate Research
Improves understanding of drilling-induced casing wear by quantifying how load and speed affect wear and failure modes; I designed and ran the instrumented test setup and linked wear rates to surface morphology and mechanisms.
Date: 2023
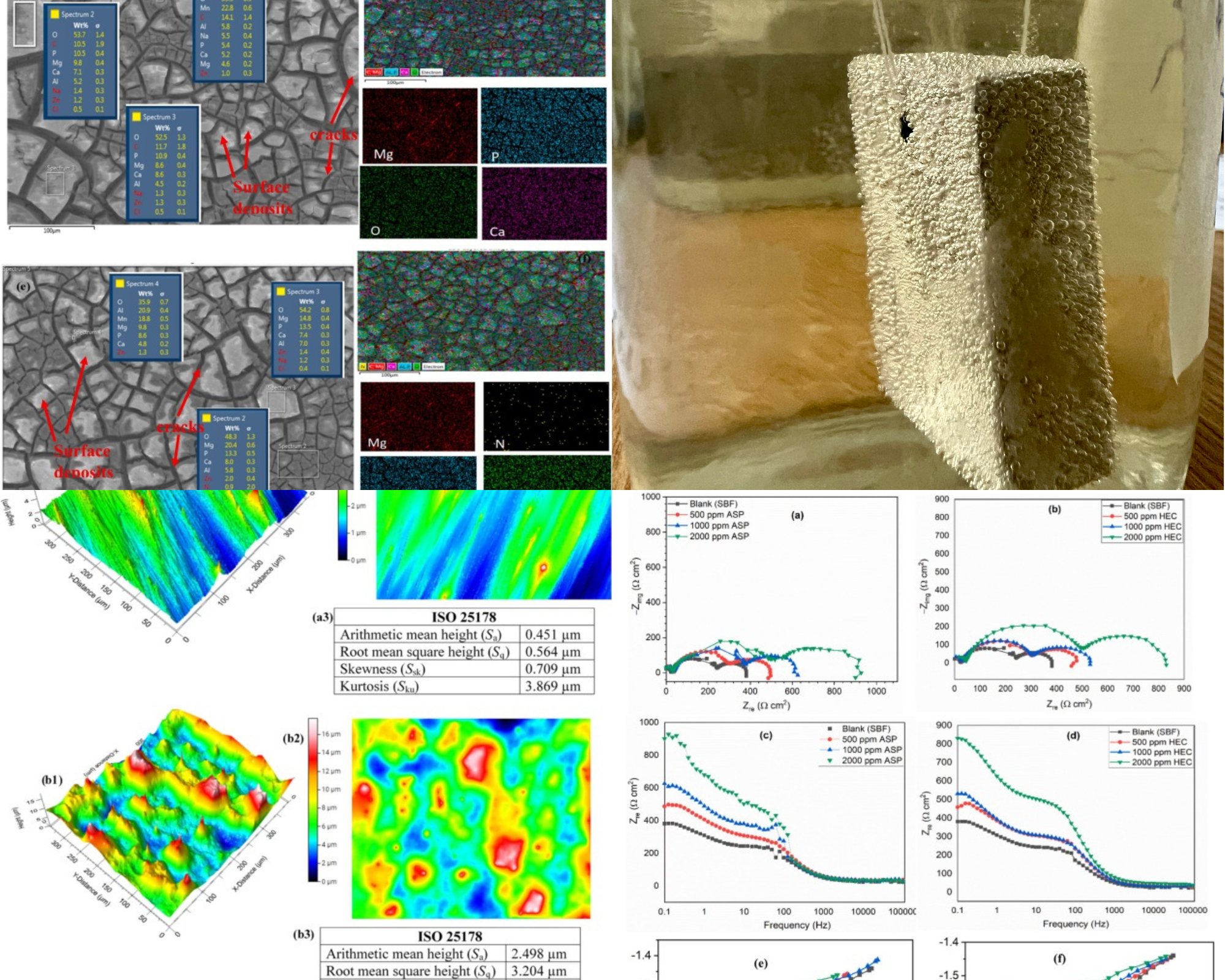
Eco-friendly corrosion inhibition for AZ31 magnesium in simulated body fluid
Context: Summer Undergraduate Research (SURE223 Grant)
Advances biodegradable magnesium implants by identifying effective, biocompatible corrosion inhibitors and explaining their protection mechanisms; I led the experimental workflow, surface characterization, and mechanism-level analysis.
Date: 2023